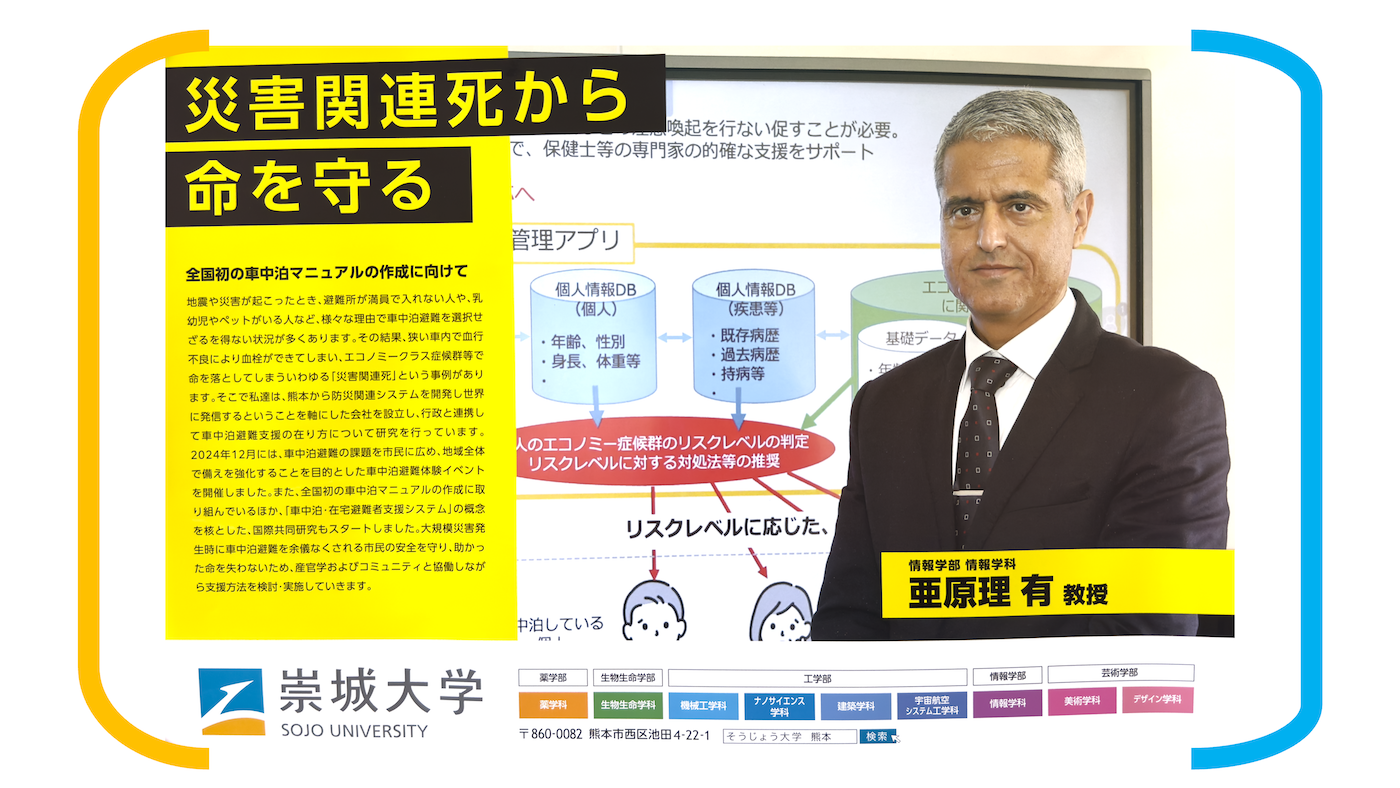
地震や豪雨などの大規模災害時には、避難所の満員や乳幼児・高齢者・ペットへの配慮などから、車中泊避難を選択せざるを得ない人が少なくありません。 しかし、狭い車内での長時間避難は、血栓症やエコノミークラス症候群を招き、「災害関連死」につながる危険があります。
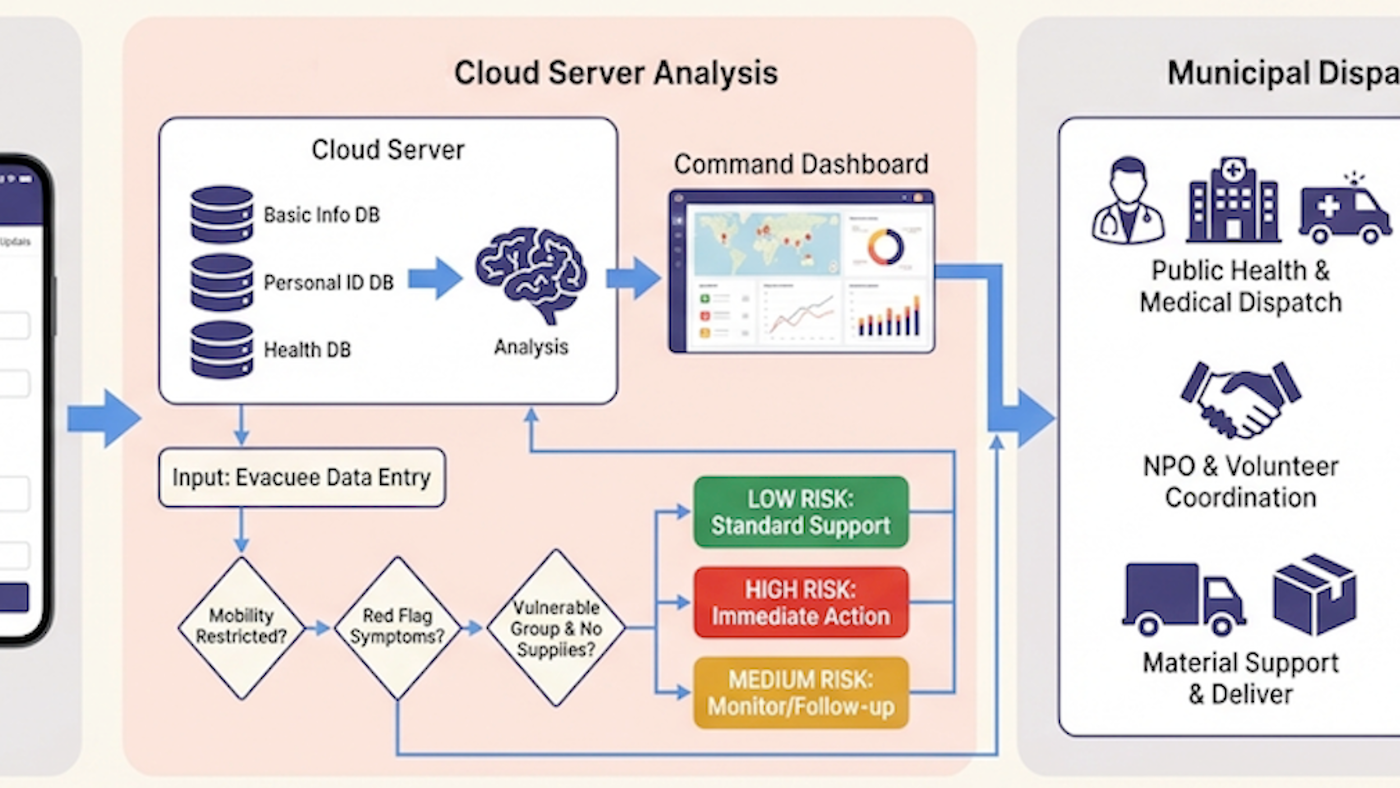
亜原理研究室では、こうした課題に対応するため、車中泊避難者支援・在宅避難者支援を含む防災DXの研究に取り組んでいます。 避難者登録、健康状態の把握、支援ニーズの管理、関係機関の情報共有を一体的に支える仕組みを、自治体の実務や災害現場での運用まで見据えて設計・実装しています。
熊本を拠点に、行政や地域と連携した実践的研究を進めるとともに、社会実装と国際展開も推進しています。 本研究室は、産官学および地域コミュニティとの協働を通じて、災害関連死を防ぐ実効性の高い支援の仕組みづくりを目指しています。
- 国内初!熊本版車中泊避難者支援ガイドライン・マニュアルの策定
- 令和7年12月実施 熊本市「車中泊避難実証実験」アンケート調査要約
- ニュージーランド王立学会の国際共同研究プロジェクトに採択
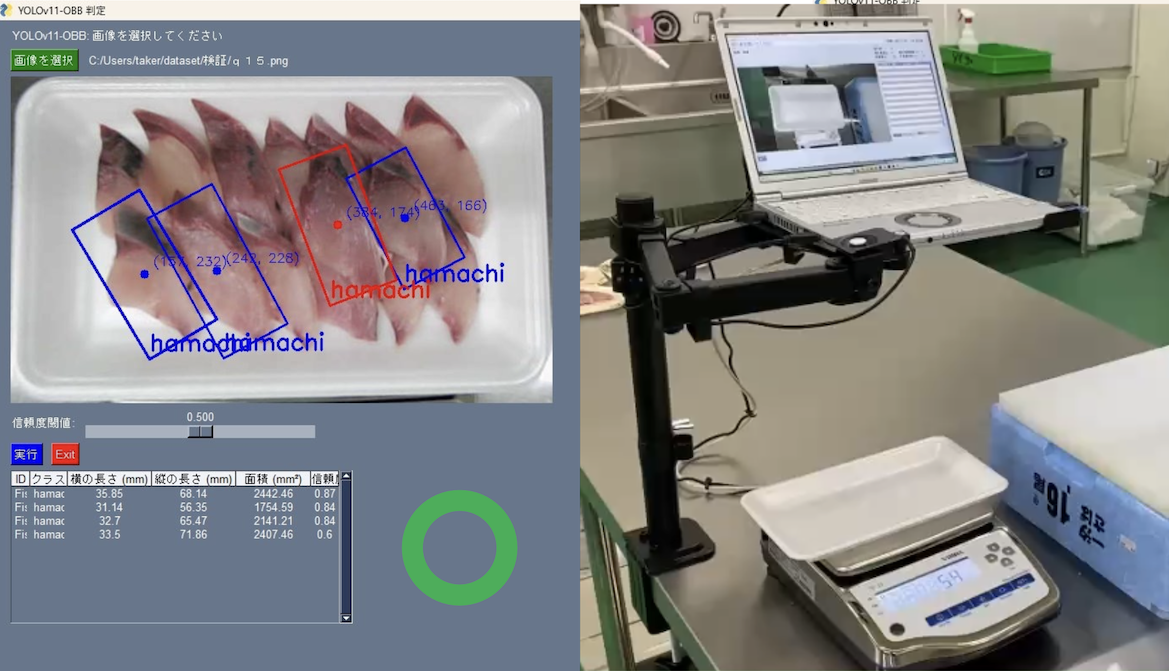
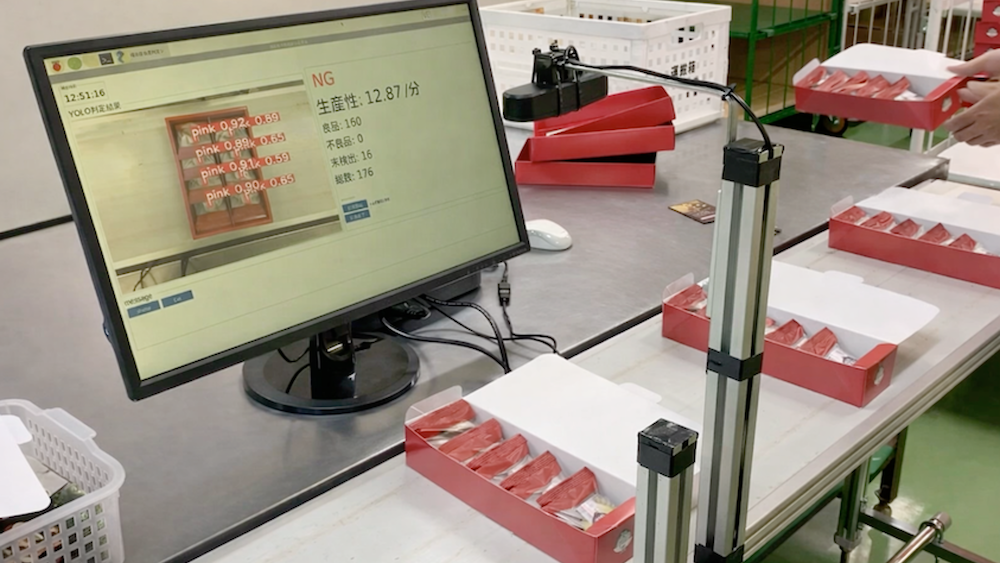
- 国内初!デジタルとアナログの比較検証を実施
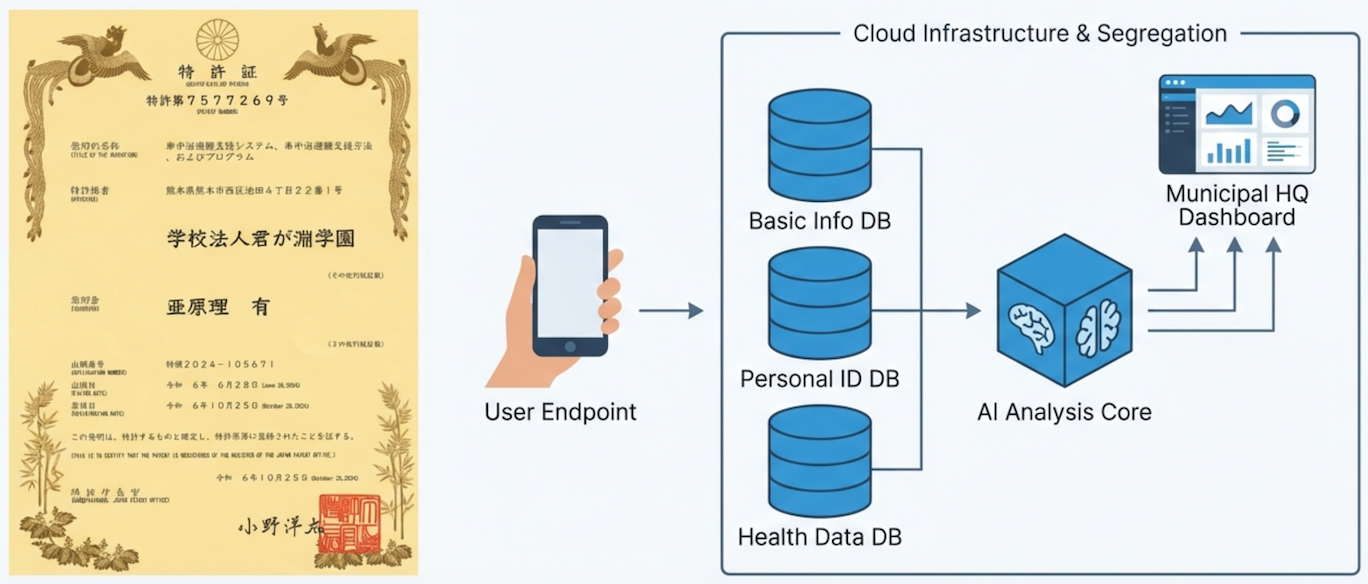
- 車中泊避難支援システムに関する特許を取得
- 災害時の車中泊避難等の課題解決に向けた研究連携協定の締結
主な実績
関連ニュース
2026.05.15亜原理有教授がIEEE-ICEIB2026でベストペーパー賞を受賞 ー「くまもとモデル」に基づく車中泊避難支援研究ー
2026.04.16産学官連携で実現、熊本市車中泊避難者支援ガイドラインを策定
2026.04.15Japan's
Kumamoto Pref. marks 10 years since two massive earthquakes
2026.04.02熊本市、車中泊用避難場所開設へ「やむを得ず」選択の避難者向け
2026.04.02【熊本地震】10年前を教訓に…車中泊避難のマニュアルとガイドラインを作成
2026.03.27車中泊支援 関連死防げ
―スマホ活用で健康状態を共有―
2026.03.19情報学科
亜原理有教授が国際共同研究プロジェクトのキックオフ会議に参加
2026.03.13車中泊の避難者を健康に Bosai Techと連携し自治体向けシステム開発中
2025.12.12「熊本市車中泊避難実証実験」に本学情報学部亜原理有教授が協力 〜国内初!デジタルとアナログの比較検証を実施〜
2025.12.11車中泊マニュアルの策定情報学科が熊本市と初の実証実験
2025.09.24情報学科・亜原理有教授発案を基盤に、国際共同研究がニュージーランド王立学会に採択されました
2025.06.17車中泊避難の実証実験
熊本市とBosai Techと連携
2025.04.15熊本地震から9年
情報学科 亜原理有教授が熊本市・Bosai Tech(株)と協力し車中泊避難支援へ
2025.03.26熊本市 在宅・車中泊避難者等の支援の手引き(車中泊避難者支援版)」を情報学部 亜原理准教授が中心となり取りまとめを進めています
2025.02.03BosaiTech株式会社が崇城大学発ベンチャーに認定&特許取得
2025.01.07災害時の車中泊避難支援を目指して ― 熊本で初の車中泊イベントを開催
2024.09.27情報学科亜原理准教授が中心に「災害時の車中泊避難等の問題解決に向けた研究に関する連携協定締結式」